
AUTORECON project
A wide range of industrial sectors today is still organized in a fixed combination of fixed linear sequences of operations where manual and automated tasks are repeated in the same way each cycle time in the most suitable and optimized way. This paradigm is very efficient when the production is set to the maximum capacity (usually for most products this is limited to a relatively short period following the SOP [1]) and considering no halt situation due to technical problems, but very inefficient in case of dis-saturation of the lines. Even the most flexible among production lines is still based on the same sequential hierarchical paradigm since flexibility is declined as the possibility to mix in the same plant different but still sequential processes for different variants of the products. AUTORECON aims at introducing a radical change in the paradigm: in the same plant the sequence can be changed by introducing autonomous production/handling units which can change task (from joining to handling and vice versa) and position (around the shop floor), eventually cooperating among themselves, based on current process sequences, nevertheless having always the possibility to recover eventual failures to any Robot/Tool by switching position/job, auto reconfiguring themselves, the tools and the line to answer quickly to the stop of production and reducing losses as much as possible.
AUTORECON Service oriented assembly line operation and control
Based on the above, the aim of the project is to radically advance the way that today’s production lines are conceived, designed and built allowing the elimination or reduction of technologies that are limiting the flexibility potential of the production system. Typical examples of these technologies, coming from existing industrial environments, include the adopted fixed control logic and the rigid flow line structures having expensive, single-purpose transportation equipment and complex programming methods. AUTORECON proposes the enabling, development and introduction of a) autonomous, exchangeable and mobile production units, b) highly interactive robotic structures c) random (non-hierarchical agglomerates) production flow and all these, integrated under a common and open architecture. The factory of the future as envisaged by the AUTORECON project will encompass the following technologies:

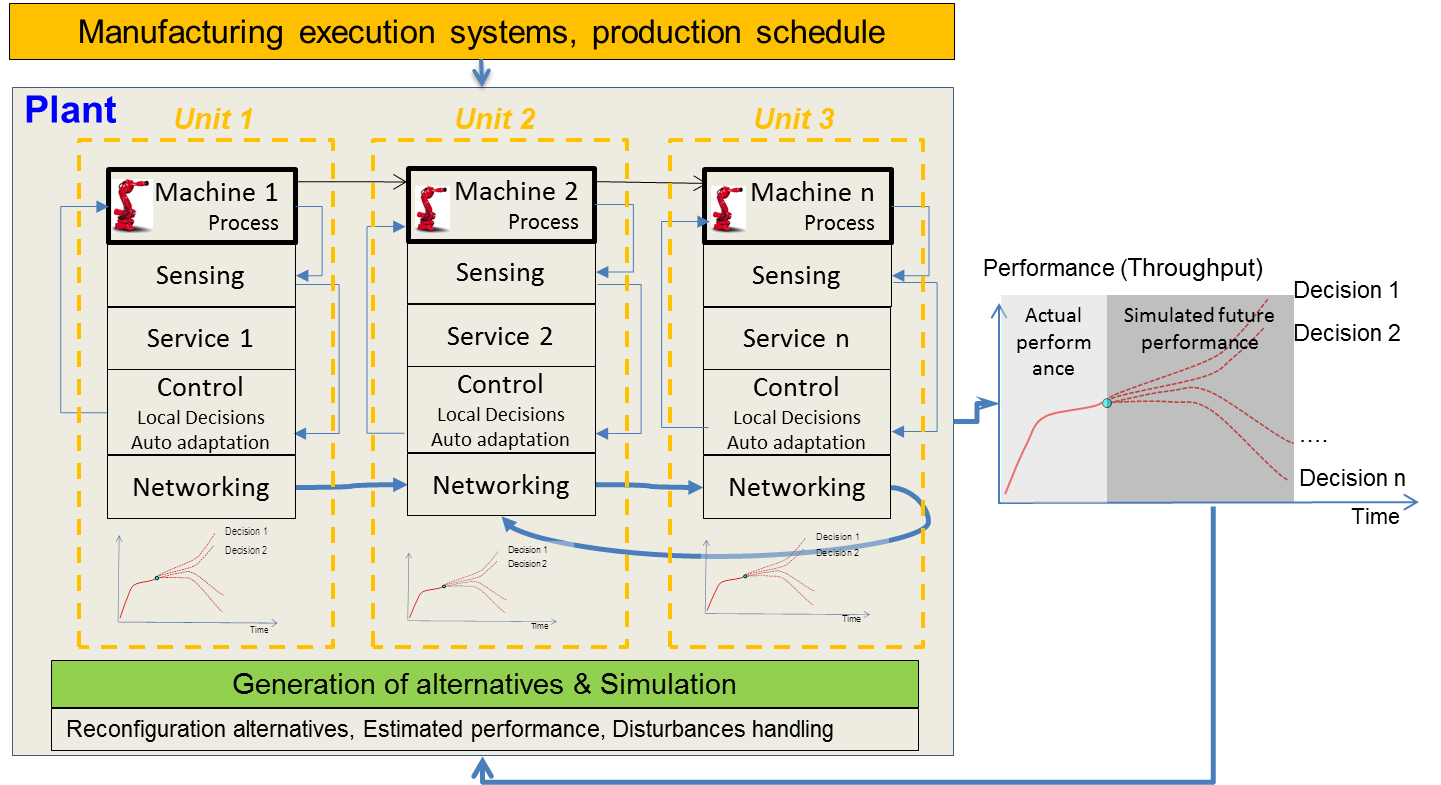
AUTORECON Architecture
- Reconfigurable “Transformers” like tools that will enable autonomous flexible assembly equipment to easily adapt production process to process disturbances and market variations, integrating novel actuators (e.g. magnet based) & WSN (Wireless Sensor Network).
- Intelligent Control & Monitoring systems enabling enhanced performance and high level re-configurability of production processes using distributed controls (peripheral & centralized), and open architecture (e.g. ROS, Linux based, C4G Open controller) linked to information from sensors.
- Integration & communication architecture to allow easier integration and networking of the control systems utilizing agent-based, web-services and ontology technologies. The architecture will involve all the mechanisms for communication and message exchange that will allow to:
- Easily plug new components/robot allowing their automatic set-up and operation,
- enable robot to robot co-operation, allowing robot-based product parts transfer without the use of traditional transfer lines or fixed on-ground tooling;

AUTORECON communication and integration concept
[1] SOP – Start Of Production
